Brief description
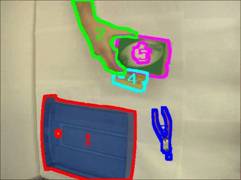
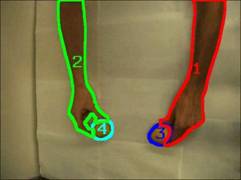
We present a robust object tracking algorithm that handles spatially extended and temporally long object occlusions. The proposed approach is based on the concept of ``object permanence'' which suggests that a totally occluded object will re-emerge near its occluder. The proposed method does not require prior training to account for differences in the shape, size, color or motion of the objects to be tracked. Instead, the method automatically and dynamically builds appropriate object representations that enable robust and effective tracking and occlusion reasoning. The proposed approach has been evaluated on several image applications. Experimental results demonstrate that the developed tracker is capable of handling several challenging situations, where the labels of objects are correctly identified and maintained over time, despite the complex interactions among the tracked objects that lead to several layers of occlusions.
Sample results
A video with sample qualitative results.
Results on the “lego 1” sequence, available at http://www.cc.gatech.edu/cpl/projects/occlusion/

Results on the “lego 2” sequence, available at http://www.cc.gatech.edu/cpl/projects/occlusion/

Results on the “lego 3” sequence, available at http://www.cc.gatech.edu/cpl/projects/occlusion/




Contributors
- Vasilis Papadourakis, Antonis Argyros.
- This work has been partially supported by the EU-IST Integrated Project GRASP.
Relevant publications
- V. Papadourakis, A.A. Argyros, “Multiple Objects Tracking in the Presence of Long-term Occlusions”, in Computer Vision and Image Understanding, Elsevier, vol. 114, issue 7, pp. 835-846, July 2010.
The electronic versions of the above publications can be downloaded from my publications page.