Brief description
We have been developing tools that enable the acquisition of perspectively correct images from panoramic views. The developed tools assume a panoramic camera that consists of a hyperboloid mirror on top of a perspective camera. The input to the application can be either a sequence of images (saved on the disk in bitmap or windows metafile format), or live input from an actual panoramic camera. The virtual perspective camera can be at any position and look at any direction in the world, within the visual field of the panoramic camera. Multiple different views can be opened simultaneously and the number of views is constrained only by the host machine’s speed. T here are five predefined views (front view, back view, right view, left view and bird’s-eye view) and two special operations (half and double size) to enable quick resizing of an already defined view. Besides the predefined views, the user is also able to define custom views, by defining a number of parameters related to the position, looking direction, resolution, field of view of the virtual perspective camera as well as the parameters of the panoramic camera (CCD, lens and parameters of the mirror). In that sense, the system is able to deliver any possible perspective view and take input from any panoramic camera. The parameters of any user-defined view can be saved on the disk for later retrieval and use. A view can be paused at any moment. Moreover, a view can be displayed in full-screen mode at any time. The resulting image sequences can be saved on the disk as bitmap files.
Sample results

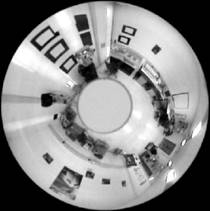
Lefkos, the robotic platform of CVRL with a panoramic camera mounted on it and an acquired panoramic camera

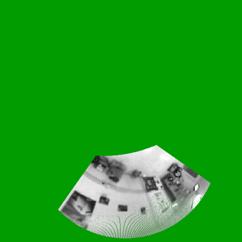
Left: Perspectively correct view. Virtual camera placed at a direction of 80o on the panorama. Right: Non-green points are the ones used to reproduce the perspectively correct image at the left

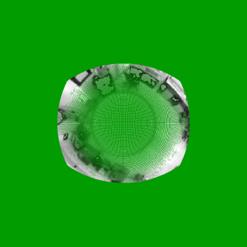
Left: Birds’ eye view produced from the same panoramic image. Right: Non-green points are the ones used to reproduce the perspectively correct image at the left
s

|
|||
| Reconstructed front view. | |||

|
|

|
|
| Reconstructed left view. | Reconstructed bird-eye view. | Reconstructed right view. | |

|
|||
| Reconstructed back view. | |||
{kind=link}
Contributors
George Akoumianakis, Antonis Argyros
Relevant publications
- E. Tzamali, G. Akoumianakis, A.A. Argyros and Y.J. Stephanedes, "Improved design for vision-based incident detection in transportation systems using real-time view transformations", Journal of transportation engineering, American Society of Civil Engineers, vol. 132, no. 11, pp. 837-844, 2006.
The electronic versions of the above publications can be downloaded from my publications page.