Brief description
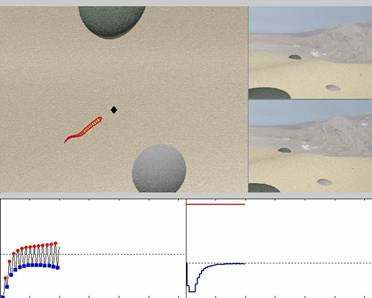
This work addresses the problem of vision-based closed-loop control for undulatory robots. We present an image based visual servoing scheme, which drives the robot to a desired location specified by a target image, without explicitly estimating its pose. Instead, the control relies on the computation of the epipolar geometry between the current and target images. We analyze controllability and stability of the proposed control scheme, which is validated by simulation studies using the SIMUUN computational tools. Preliminary experiments, involving the Nereisbot undulatory robotic prototype, are also presented.
Sample results
Contributors
G. Lopez-Nicolas, M. Sfakiotakis, D. P. Tsakiris, Antonis Argyros, C. Sagues, J.J. Guerrero.
Relevant publications
- G.Lopez-Nicolas, M.Sfakiotakis, D.P. Tsakiris, A.A. Argyros, C. Sagues, J.J. Guerrero, “Visual Homing for Undulatory Robotic Locomotion”, in Proceedings of 2009 IEEE International Conference on Robotics and Automation, pp. 2629-2636, Kobe, Japan, May 12-17, 2009.
The electronic versions of the above publications can be downloaded from my publications page.