Brief description
We present a new method for tracking the 3D position, global orientation and full articulation of human hands. Inspired by recent advances in model-based, hypothesize-and-test methods, the high-dimensional parameter space of hand configurations is explored with a novel evolutionary optimization technique. The proposed method capitalizes on the fact that the quasi-random samples of the Sobol sequence have low discrepancy and exhibit a more uniform coverage of the sampled space compared to random samples obtained from the uniform distribution. The method has been tested for the problems of tracking the articulation of a single hand (27D parameter space) and two hands (54D space). Extensive experiments have been carried out with synthetic and real data, in comparison with state of the art methods. The quantitative evaluation shows that for cases of limited computational resources, the new approach achieves a speed-up of four (single hand tracking) and eight (two hands tracking) without compromising tracking accuracy. Interestingly, the proposed method is preferable compared to the state of the art either in the case of limited computational resources or in the case of more complex (i.e., higher dimensional) problems, thus improving the applicability of the method in a number of application domains.
Sample results
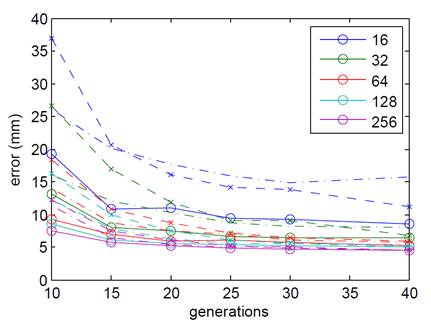
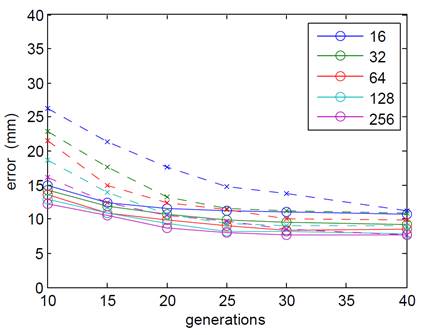
Left: The performance of the proposed method (solid lines) in comparison to that of BMVC 2011 (dashed) for the problem of single hand tracking and for different particle and generation counts. The dotted lines illustrate the performance of the proposed evolutionary scheme using uniform random instead of quasi-random sampling. Right: The performance of the proposed method (solid lines) in comparison to that of CVPR 2012 (dashed) for the problem of tracking two strongly interacting hands and for different particle and generation counts.
A video with 3D tracking experiments.
Contributors
- Iason Oikonomidis, Antonis Argyros.
- This work was partially supported by the EU-FP7 integrated projects WEARHAP and robohow.cog.
Relevant publications
- I. Oikonomidis, M. Lourakis, A.A. Argyros, “Evolutionary Quasi-random Search for Hand Articulations Tracking”, IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2014), Columbus, Ohio, USA, 24-27 June, 2014.
The electronic versions of the above publications can be downloaded from my publications page.
<